Method
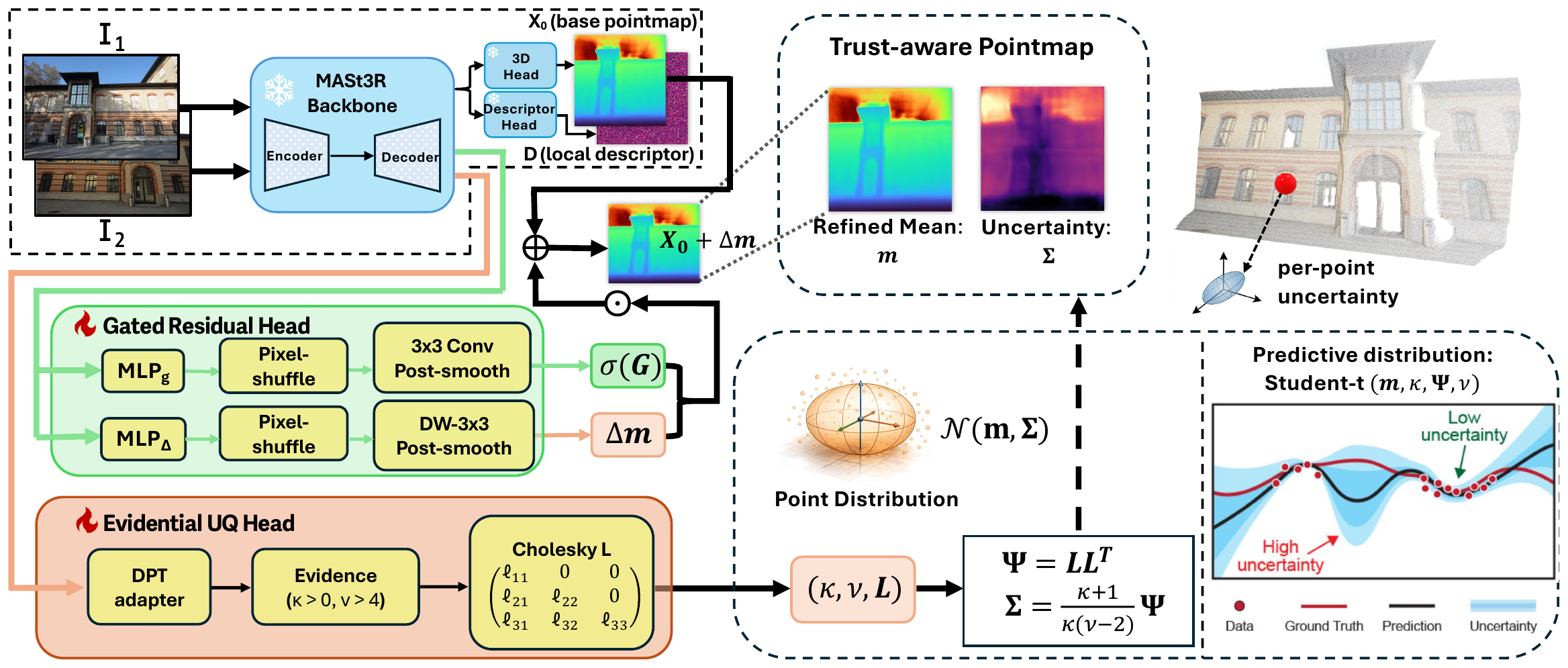
Trust3R turns a feed-forward 3D reconstructor into a model that not only predicts geometry, but also tells us where that geometry can be trusted. Starting from a frozen MASt3R backbone, Trust3R adds two lightweight heads. The evidential uncertainty head predicts a compact distribution for every 3D point, producing a dense uncertainty map in a single forward pass — without ensembles or Monte Carlo sampling. The gated residual head makes small, selective corrections to the predicted pointmap, while preserving the strong geometry already learned by the pretrained backbone.